Задать вопрос
Менеджеры компании с радостью ответят на ваши вопросы и произведут расчет стоимости необходимой продукции.

Комфорт и простота работы, воплощенные в новых технологичных инструментах.
Локация: Осташёво, Волоколамский округ, Московская область. Фрагментарно сохранившаяся усадьба Муравьёвых.
Усадьба находится на берегу Рузского водохранилища, которое было создано в 1960 году. К главному усадебному дому ведёт липовая въездная аллея. Вокруг усадьбы был липовый парк. Основной дом стоит на высоком берегу и из него прекрасно виден изгиб и ширь реки.
В бывшей усадьбе (XVIII – XIX в.в.), принадлежащей Н.Н. Муравьёву, в 1816 году проходили занятия, основанной им школы офицеров Генерального штаба. Из числа её воспитанников вышло 22 декабриста. Усадьба сменила нескольких владельцев, последним из которых был внук Николая I, великий князь Константин Константинович Романов, поэт серебряного века. Рядом с усадьбой находится храм-усыпальница, построеная в 1915 году над могилой князя Олега Константиновича Романова, который погиб на фронте в Первой Мировой войне.
Задача: Реставрационные работы с сохранением исторического вида объекта.
Технология одновременной локализации и картографирования (SLAM) позволяет быстро создавать цифровые модели окружающего пространства. Принцип работы заключается в синхронном использовании двух измерительных устройств - лазерного сканера и инерциальной системы (IMU). Их данные обрабатываются на компьютере, причем показания IMU корректируются данными со сканера, по которым вычисляется траектория движения сканера. Этот процесс полностью автоматизирован. Проще говоря, сканер определяет свое местоположение относительно окружающих объектов и одновременно оцифровывает эти объекты в виде облака точек.
Изначально SLAM-технология предполагала отсутствие GPS-приемника, позволяя проводить сканирование в местах, где нет сигнала спутников. Но со временем технологии развивались, и сейчас существуют модели сканеров, которые совмещают SLAM с GPS-навигацией.
Решаемые задачи:
 |
Время на подготовку – 1 минута. Обход маршрута 1 – 5 минут Обход маршрута 2 – 4,5 минуты |
 |
 |
 |
 |
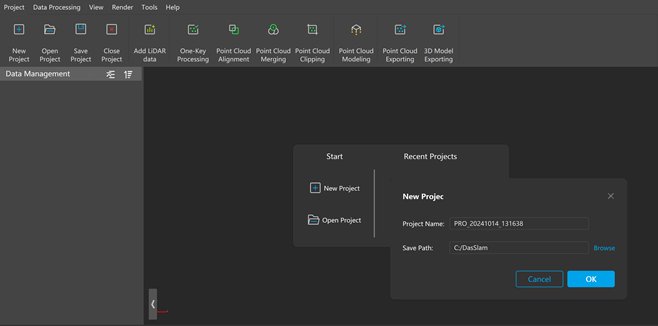 |
Первым шагом традиционно выбираем место для хранения проекта и его название. Для импорта данных – добавляем отснятый в поле материал путем выбора папки хранения данных. |
 |
В строке состояния статуса у нас отобразится информация о том, что наши данные успешно импортированны, но еще не отпроцессированны (распакованы в понятные для программного обеспечения алгоритмы).
|
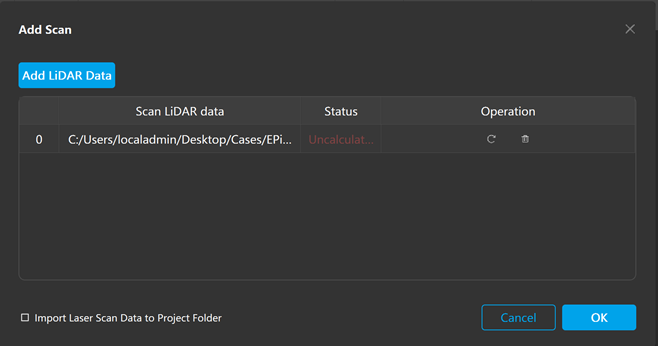 |
Нажимая ОК – автоматиески запускается процесс распаковки данных. |
 |
Требующееся время на процессинга данных на рекомендуемой конфигурации компьютера – 5 минут. |
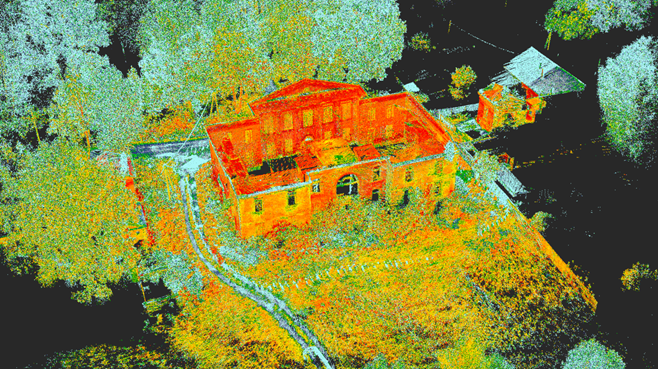 |
По окончании процесса мы уже можем увидеть как выглядит наш объект сканирования. |
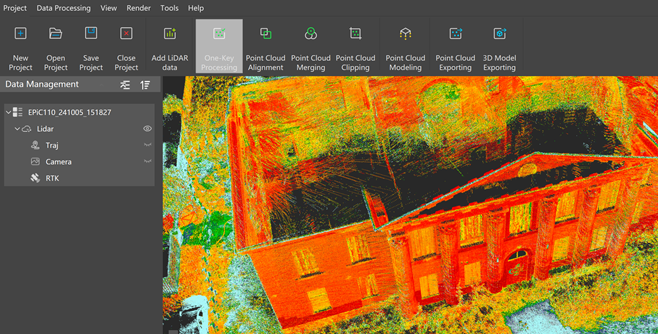 |
Следующим шагом необходимо оптимизировать наш проект. |
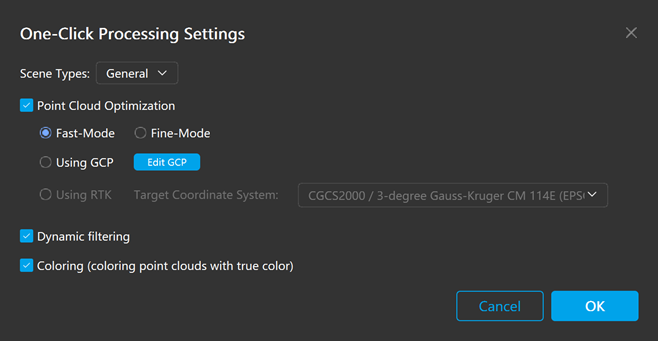
Нажимая кнопку ОК, запускается аналогичнная строка состояния обработки и через 5-10 минут в зависимости от выбранных процессов мы получаем готовый результат – оптимизированное облако точек.
 |
 |
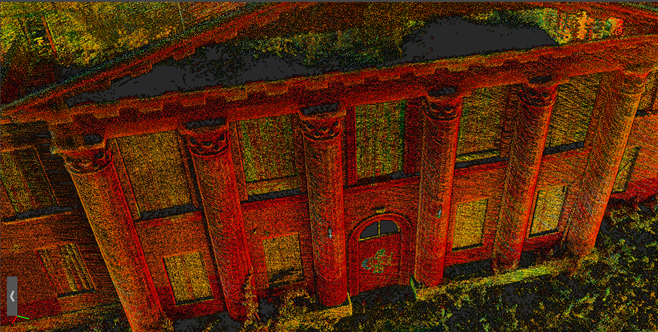
Пример отображения облака точек в цвете и силе интенсивности сигнала

Облако точек с отображением трека (движения) оператора

Раскадровка отснятых камерой панорам
 |
 |
У нас есть возможность выбрать панораму с камеры в режиме раздельного экрана, либо в отдельном виде для детального изучения отснятого материала.
 |
 |
Пример отсканированного белокаменного объекта – традиционно крайне тяжелая поверхность для оптических устройств ввиду высокой степени отражения сигнала. Даже в такой ситуации сканер показывает себя отлично.
Итак, очевидным преимуществом технологии является высокая скорость сбора данных и накопления информации о состоянии объекта.
Процесс съемки и обработки данных является полностью автоматизированным и минимизирует трудовые затраты.
Наличие функции чистки динамических объектов позволяет серьезно сократить лишние шумы, вызванные прохожими, самим оператором съемки и прочими посторонними элементами.
Высокая степень комфорта для пользователя в процессе сбора и обработки данных.