Какие есть слабые стороны у технологии SLAM-сканирования? Можно ли выполнять подеревную и фасадную съемку SLAM сканером? Можно ли использовать SLAM сканер для создания технического плана помещений? А для топографии? Сможет ли SLAM сканер заменить полноценный наземный сканер?
Ответы на эти и другие вопросы вы найдете в статье наших партнеров компании ООО "НАВГЕОКОМ" (НГК), которую мы публикуем у себя в блоге.
В статье будут рассмотрены сильные и слабые стороны технологии SLAM-сканирования при решении различных инженерных задач. Примеры даны на основе популярного
SLAM-сканера и доступных программных продуктов для работы с облаками точек:

НАНОКАД с модулем "Облака точек" (отечественный софт)
|

КРЕДО 3D СКАН (отечественный софт)
|

ZWCAD (китайский софт)
|

Leica Cyclone 3DR (самый продвинутый софт от Leica Geosystems, Швейцария)
|
В ходе теста ООО "НАВГЕОКОМ" проверили:
- Реальную дальность работы SLAM-сканера,
- Точность получаемых данных,
- Возможные сферы применения SLAM-технологии,
- Особенности SLAM-сканеров (сильные и слабые стороны).
Сегодня на рынке представлены десятки различных компактных ручных SLAM-сканеров. Они отличаются скоростью сканирования (320 или 640 тыс. точек в секунду) и форм-фактором. Это может быть моноблок (без проводов) или решение с внешним блоком управления, в который пишутся данные и там же могут находится аккумуляторы. К сканеру можно подключать недорогие ГНСС-приемники и фото-видео камеры (у некоторых моделей эти модули встроены в сканер).
|

Пример SLAM-сканера AM.TECH MLS10 с внешним блоком управления: данные пишутся во внешний блок, там же находится аккумулятор. Над сканером вы видите фотокамеру.
|

Пример компактного ручного SLAM-сканера без внешнего блока управления. Аккумулятор находится в ручке сканера.
Для удобства при сканировании больших площадей можно использовать крепления на рюкзак.

Вариант крепления SLAM-сканера на рюкзаке - удобное решение при съемке больших объектов.
Сканеры различных производителей отличаются возможностями полевого и офисного программного обеспечения.
SLAM-сканеры используют лидарную съемку. Вращающаяся головка лидара позволяет за считанные секунды получать облака точек и снимать ситуацию вокруг нас. Процедура сбора данных проста: включаем сканер и проходим вдоль интересующего объекта.
Многих подкупает простота и высокая скорость сбора данных SLAM-сканером. Специалисты НГК проверили на реальных объектах, так ли это на самом деле, отсняв SLAM-сканером несколько объектов:

Многоуровневую парковку высотой 25 метров
|

Территорию технопарка "Отрадное" площадью 2,8 Га
|

Офисное помещение с лестничным проемом
|

Выполнили фасадную съемку
|
Для определения максимальной дальности измерений сканера специалисты выполнили отдельный тест: с крыши парковки сняли фасад соседнего здания и выполнили промер дальномером оконного проема на первом этаже для контроля точности.
Контрольные промеры дальномером специалисты делали при съемке самой парковки, территории технопарка и при фасадной съемке.
Полученное в поле облако точек с любого SLAM-сканера нужно предобработать в родном программном обеспечении (чаще всего оно идет в комплекте со сканером). Там мы можем уравнять облака точек и посадить их в нужную систему координат. Для привязки облаков можно использовать наземные или настенные марки с известными координатами.
Пример настенной марки
Некоторые софты позволяют автоматически удалять подвижные объекты, которые случайно могли попасть в съемку (люди, машины и т.д.). Предобработка занимает от 5 минут и более, в зависимости от размеров объекта. При обработке больших массивов данных предобработка может занять несколько часов.
Далее, в зависимости от решаемых задач, предобработанное облако можно передать в одну из программ для получения конечного результата. Чаще всего используются форматы: las, pts, xyz и др.
Первый объект, который отсканировали НГК, – многоуровневая автомобильная парковка высотой 25 метров. Для контроля качества данных специалисты измерили лазерным дальномером высоту одного из бетонных столбов и расстояние между соседними столбами.
Высота столба, измеренная дальномером DISTO: 2,5802 м.
Высота столба по облаку точек: 2,5820 м.
Расхождение: 2 мм.
Расстояние между столбами, измеренное дальномером DISTO: 7, 6812 м.
Это же расстояние по облаку точек: 7,691 м.
Расхождение: 10 мм.

Контрольный промер дальномером расстояние между столбами на парковке
На точность сравнения влияет плотность облака точек и выбор точек на облаке при измерении расстояния. Полученные расхождения могут быть не обязательно ошибками сканера, а пользовательскими ошибками выбора неверной точки на облаке.
Ниже вы видите на экране результат отрисовки этажа парковки в программном продукте Нанокад. Облака точек.
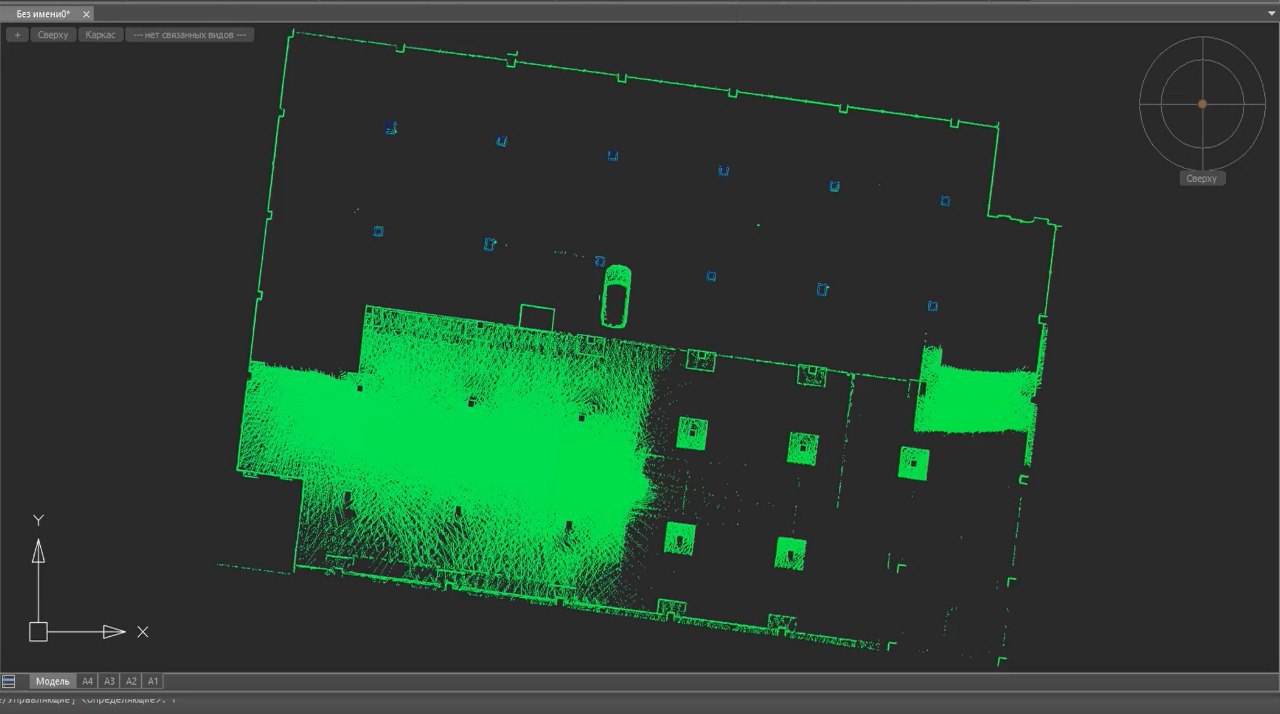
Нанокад имеет большой набор инструментов привычных CAD-программ: создание линий, дуг, полилиний, 3D объектов. Программа работает с плоскостями и поверхностями, имеет большой список форматов импорта и экспорта облаков точек, фильтрацию облаков, работу с системами координат, возможность сшивки облаков по связующим точкам, построение поверхностей, подсчет объемов и площадей. Есть инструменты отрисовки рельефа, построения горизонталей и вставки топографических условных знаков. При работе с облаком можно использовать сечения и лимит-боксы.
Инструменты ReClouds позволяют искать и строить поверхность земли, классифицировать растительность, выполнять сравнение облака с облаком и объектом, искать трубопроводы и фланцы. По полученным данным можно подготавливать отчеты и ведомости.
Второй объект нашей съемки — территория технопарка "Отрадное" площадью 2,8 Га. НГК выполнили съемку SLAM-сканером за 14 минут, на предобработку ушло 25 минут. Далее отрисовали топографию в программном продукте КРЕДО 3D СКАН.

Топография с облаком точек в ПО КРЕДО 3D СКАН
Для контроля точности выполнили промеры между бордюрами на тротуаре и определили высоту лавки.
Промер дальномером DISTO расстояния между бордюрами: 3,1299 м, то же расстояние по облаку точек: 3,1260 м. Расхождение: 4 мм.
Высота лавки, определенная дальномером DISTO: 0,9259 м.
Та же высота по облаку точек: 0,9290 м. Расхождение: 3 мм.

Измерение высоты лавки лазерным дальномером

Определение высоты лавки по облаку точек.
Программное обеспечение КРЕДО 3Д СКАН имеет наилучший набор инструментов для создания топографических карт по облаку точек. Есть инструменты для полуавтоматического распознавания элементов дорог, таких как бордюры, дорожная разметка и знаки. Есть инструменты классификации объектов: опоры и провода ЛЭП, рельеф, растительность, здания.

Вписывание плоскостей в фасад. ПО КРЕДО 3Д СКАН.
Кроме богатого функционала для топографии программу можно использовать для отрисовки фасадов, подготовки объектов для дальнейшего моделирования и использования в BIM.
Также есть имеет инструменты, позволяющие раскрашивать облака точек по отклонению, например, от заданной проектной плоскости.

Раскраска облака по отклонению от плоскости фасада. ПО КРЕДО 3Д СКАН.
Преимуществом программы КРЕДО является то, что КРЕДО 3Д СКАН является одной из частей большой экосистемы КРЕДО, что позволяет отрисованные данные по сканированию использовать в других специализированных продуктах КРЕДО.
Третий объект съемки – офисное помещение с лестничным пролетом. На съёмку сканером ушло 5 минут и еще 20 минут на предобработку. Для примера получения конечного результата на этом объекте мы использовали китайскую программу ZWCAD.
Пример облака точек, раскрашенного по интенсивности, в ПО ZWCAD.
Это недорогой аналог AutoCAD и Нанокад, который обладает всеми необходимыми инструментами CAD-проектирования. Программа позволяет импортировать облака точек в популярных форматах и работать с IFC форматом для целей BIM. Программа полностью русифицирована и имеет приятный и привычный интерфейс. Имеет приложение для создания проектной и рабочей документации по отечественному ГОСТу 21.101-2020 СПД.
Фасадную съемку мы отрисовали в программе Leica Cyclone 3DR. Это, наверное, самая мощная программа для инспектирования и проверки геометрии любых объектов. Она также позволяет решать задачи 3D моделирования, подсчета объемов и построения поверхностей любой сложности. Имеет возможность написания своих скриптов для решения специализированных задач.

Фасад здания в ПО Leica Cyclone 3DR
На YouTube канале НГК вы можете увидеть пару примеров подобных скриптов – для подсчета объемов штукатурки и метрологического модуля для контроля резервуаров.
Тест на дальность показал следующие результаты. Измерив расстояния по полученному с крыши облаку точек, видно, что максимальная дальность соответствует заявленным характеристикам сканера – 120 метров.

Проведение теста на дальность работы SLAM-сканера с крыши многоуровневой парковки
Однако плотность точек на 120 метрах составила около 20 точек на квадратный метр, и никаких характерных элементов объекта на этом расстоянии практически невозможно распознать.

Максимальное измеренное SLAM-сканером расстояние составило 120 метров.
С увеличением дальности до объекта снижается точность - на расстоянии около 40 метров расхождение длинны оконного проема, измеренного дальномером и по облаку, составило от 20 до 40 мм из-за слишком разряженного облака.

Контрольный промер лазерным дальномером Leica Disto длины оконного проема.

То же окно на облаке точек, снятого с расстояния в 40 метров. Трудно разобрать характерные точки на окне из-за слишком разряженного облака.
Для подеревной съемки рекомендуем использовать вместе со сканером камеру – это сильно облегчает процесс дешифровки, например при определении породы деревьев. Также камеру нужно использовать если мы снимаем какие-то мелкие детали – есть вероятность что по облаку точек невозможно будет разобрать эти детали и данные с камеры нам в этом сильно помогут.
Выводы по результатам полевых испытаний SLAM сканирования:
Сильными сторонами SLAM-технологии являются:
- Мобильность и высокая скорость сбора данных, особенно на площадных и линейных объектах.
- SLAM-сканирование позволяет отказаться от использования обычных геодезических инструментов (тахеометр, гнсс-ровер или нивелир) если точность 1-2 см вас устраивает.
- Технология сбора данных очень проста и не требует продолжительного обучения.
- Плюсом также является то, что SLAM-сканер собирает избыточный набор данных, что позволяет возвращаться к полученному облаку точек и решать другие задачи.
- Данные SLAM-сканирования можно получать при любых условиях освещения – т.е мы можем работать в сумерки, ночью и в темных помещениях.
- Использование камеры и раскрашенного облака точек позволяет упростить камеральную обработку и выполнять посторбаботку даже человеком, который не был на объекте.
- Нет необходимости ведения полевого абриса.
Слабые стороны SLAM-технологии:
- Ограниченные дальность и точность, подходящая не под все задачи.
- Избыточность данных, так как облако содержит большое количество посторонних шумов, которые требуют времени на отчистку при предобработке.
- Значительно более низкая плотность получаемых данных в сравнении с классическими сканерами. Для повышения надежности, точности и для контроля желательно использовать GNSS-приемник и марки с известными координатами.
- Длительная предобратка при непрерывном сборе больших массивов данных. Иногда это может занять несколько часов.
Исходя из плюсов и минусов, SLAM-технологию, как нам кажется, можно успешно использовать для:
- Топографии,
- Подеревной съемки,
- Подсчета объемов,
- Контроля земляных работ,
- Кадастровых работ,
- Создания техпланов.
Если решаемая вами задача допускает ошибки в 1-2 см, то SLAM можно применять и для фасадной съемки, и для создания планов внутри помещений.
Надеемся, что статья была вам полезна! Читайте другие статьи блога компании НГК по ссылке.